Battlebot V1

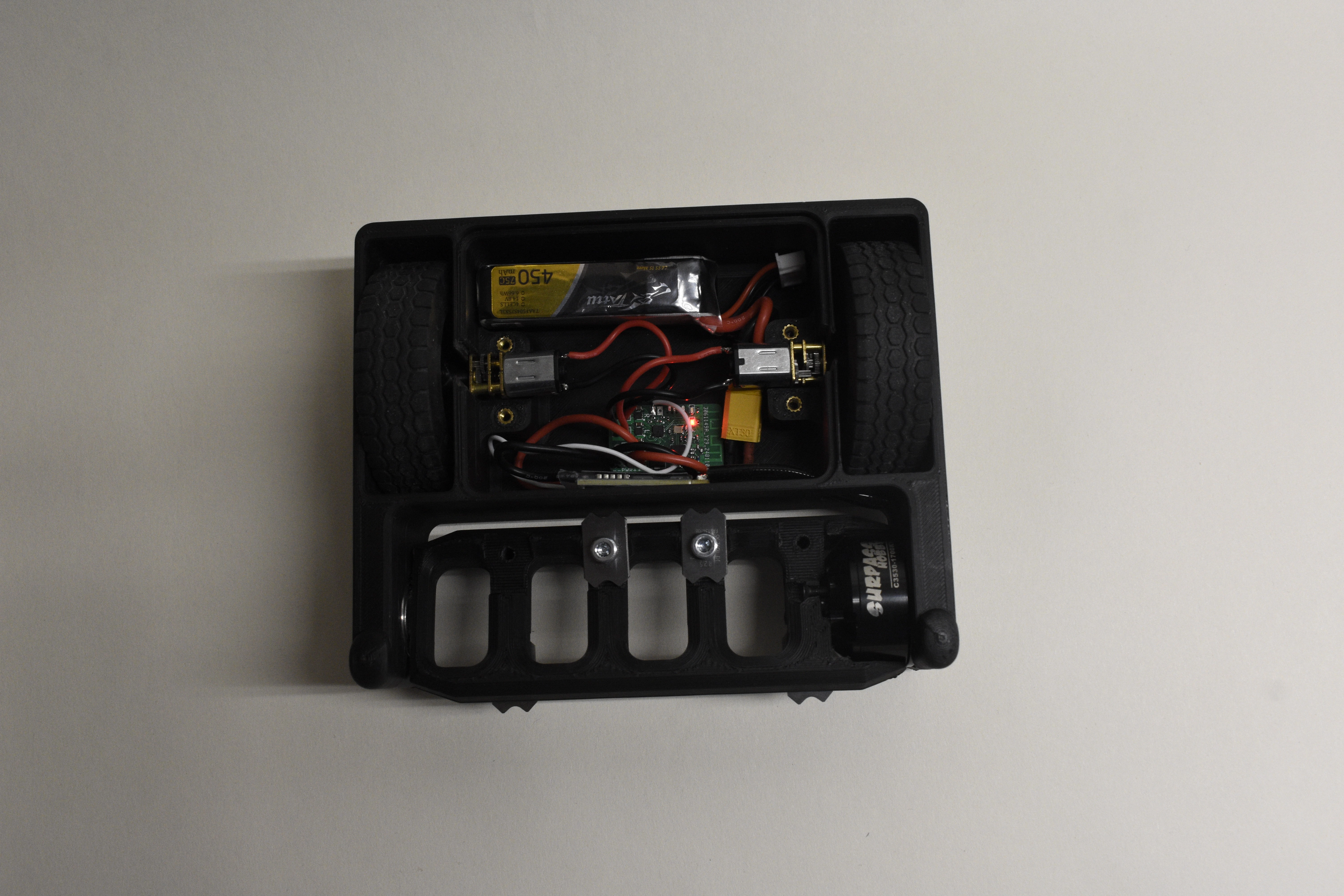
A few friends and I wanted to get into building battlebots. But there werent any competitions near us, and we didnt have a lot of experience, so we decided to organize our own small competition with a weight limit of 500g. We had about 6 months to design and build our bots from scratch. My first todo was to pick the electronics to fit into the small weight limit. I found the open source Malenki nano which is small and light enough even for fairy weight 150g bots. It is an all-in-one controller with three brushed motor drivers, the receiver and two pwm outputs for servos or bigger escs. Instead of buying a prebuilt one, I ordered the PCBs and all the parts needed to assemble it myself. This saved a lot of money and I was able to provide it to some of my friends as well. For motors I used standard N20 gear motors and a bigger brushless outrunner with an external 30A esc for the weapon. The housing is completely 3D printed using tough PLA. I designed it in Fusion360 with a monobody design and a lid that also secures the motors in place.
The weapon is a horizontal spinning bar with carbide plainer inserts screwed in for maximum damage. The weapon proved to be the weakes part as the plastic snapped pretty quickly on impact. Even when spinning the motor up to maximum speed the printed weapon expanded under the centrifugal forces and scratched the bot itself. For the next version I will definitely go for a metal weapon.
During this project I learned a lot about designing for 3D printing, brushless motors and escs as well as the basics of battlebot design and strategy. Overall it was a great experience and I am looking forward to building the next version of this bot!
